MARCA DIURNA EN SEÑALES
El problema que se intenta tratar es el de definir una metodología para decidir cuando una señal está para pintar o no, hablando de su marca diurna.
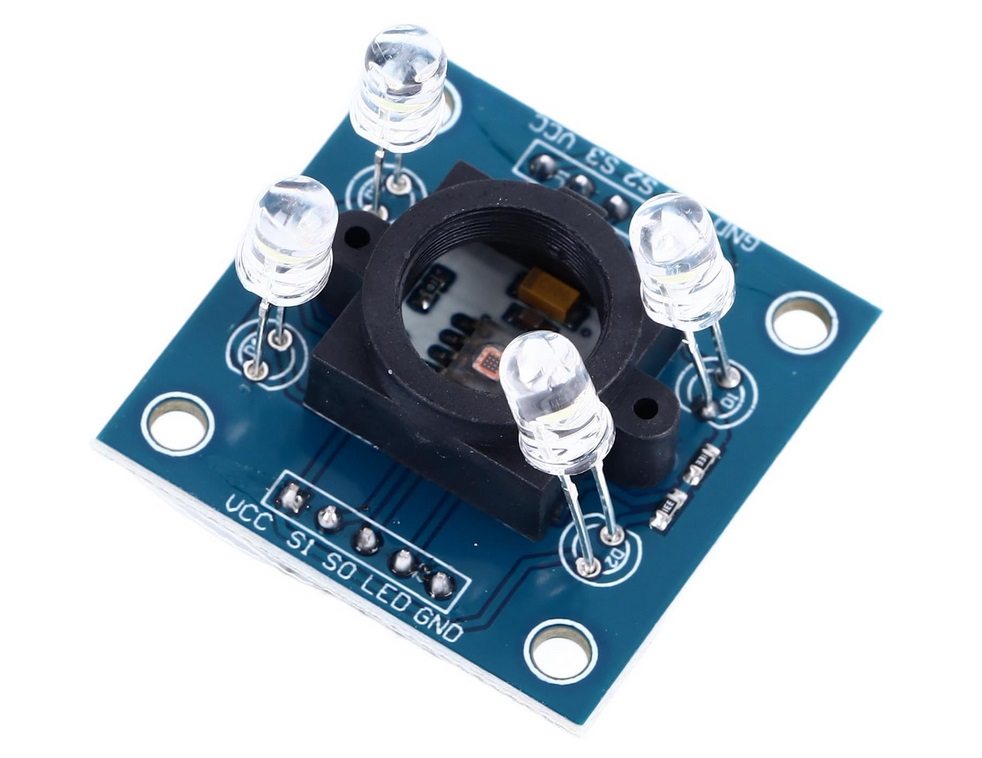
La idea es implementar un sistema que sea capaz de leer los colores y para ello se pensó en realizarlo con la ayuda de una placa arduino y un sensor de color, en particular el TCS3200 que es que mejores resultados ha ofrecido hasta el momento.
Por un lado para el desarrollo del arduino nos hemos apoyado del siguiente video.
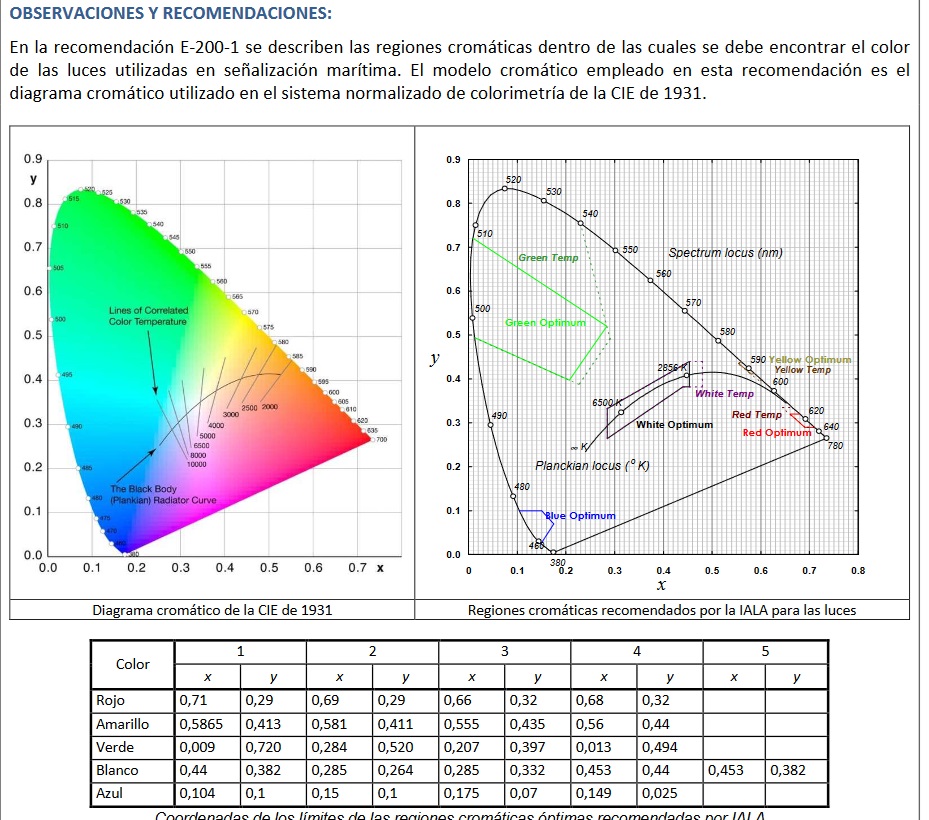
Se ha completado información con las recomendaciones de la IALA E200-1 y E200-3, ya que técnicamente el proceso es el siguiente:
Con la ayuda del sensor conectado a un arduino, lo que se obtiene son tres valores R, G y B de cuanto rojo, cuanto verde y cuanto azul hay respectivamente. Sin embargo para llevarlo a la gráfica que nos encontramos en el GEPAN hay que traducir dichos valores a valores X Y Z según CIE 1931. Y no solo eso, sino además llevarlo a una forma normalizada.
Se han consultado los siguientes enlaces para ampliar información más detallada sobre el proceso de conversión de RGB a XYZ:
La conclusión y haciendolo todo breve, finalmente es una multiplicación algebraica de matrices. La matriz RGB 3×1 se premultiplica por una matriz 3×3 para obtener una matriz XYZ de 3×1.
Una vez obtenidos los valores XYZ, se normalizan de la siguiente manera:
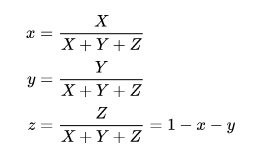
Y ya con los valores de x e y se puede entrar en la siguiente gráfica para ver si el punto obtenido cae en la zona válida o no.
Adjunto el codigo empleado en arduino.
/*
Color Sensor Calibration
color-sensor-calib.ino
Calibrate RGB Color Sensor output Pulse Widths
Uses values obtained for RGB Sensor Demo sketch
DroneBot Workshop 2020
https://dronebotworkshop.com
*/
//RGB values to XYZ using the Wide RGB D65 conversion formula
/* float a11 = 0.664511;float a12 = 0.154324;float a13 = 0.162028;
float a21 = 0.283881;float a22 = 0.668433;float a23 = 0.047685;
float a31 = 0.000088;float a32 = 0.072310;float a33 = 0.986039; */
//RGB values to XYZ using the adobe D65 conversion formula
//* 0.5767309 0.1855540 0.1881852
// 0.2973769 0.6273491 0.0752741
// 0.0270343 0.0706872 0.9911085 */
//RGB values to XYZ using the sRGB D65 conversion formula
/* float a11 = 0.4124564;float a12 = 0.3575761;float a13 = 0.1804375;
float a21 = 0.2126729;float a22 = 0.7151522;float a23 = 0.0721750;
float a31 = 0.0193339;float a32 = 0.1191920;float a33 = 0.9503041; */
//TO COPY HERE THE ONES TO USE
float a11 = 0.649926;
float a12 = 0.103455;
float a13 = 0.197109;
float a21 = 0.234327;
float a22 = 0.743075;
float a23 = 0.022598;
float a31 = 0.0000000;
float a32 = 0.053077;
float a33 = 1.035763;
float R, G, B, C;
// Define color sensor pins
#define S0 4
#define S1 5
#define S2 6
#define S3 7
#define sensorOut 8
#include <TCS3200.h>
TCS3200 tcs3200(S0, S1, S2, S3, sensorOut);
// Define color labels for identification
String color_indices[] = { "Red", "Green", "Blue" };
// Define RGB color values corresponding to the color labels
RGBColor color_values[] = {
{ 255, 0, 0 }, // Red
{ 0, 255, 0 }, // Green
{ 0, 0, 255 }, // Blue
};
int redMin = 22;
int redMax = 310;
int greenMin = 17;
int greenMax = 333;
int blueMin = 18;
int blueMax = 263;
int redValue;
int greenValue;
int blueValue;
int clearValue;
// Variables for Color Pulse Width Measurements
int redPW = 0;
int greenPW = 0;
int bluePW = 0;
int clearPW = 0;
void setup() {
// Set S0 - S3 as outputs
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
// Set Sensor output as input
pinMode(sensorOut, INPUT);
// Set Pulse Width scaling to 20%
digitalWrite(S0, HIGH);
digitalWrite(S1, LOW);
// Setup Serial Monitor
Serial.begin(9600);
}
void loop() {
String color = "";
// Read Red Pulse Width
redPW = getRedPW();
redValue = map(redPW, redMin, redMax, 255, 0);
R = constrain(redValue, 0, 255);
//R=redPW;
// Delay to stabilize sensor
delay(200);
// Read Green Pulse Width
greenPW = getGreenPW();
greenValue = map(greenPW, greenMin, greenMax, 255, 0);
G = constrain(greenValue, 0, 255);
//G=greenPW;
// Delay to stabilize sensor
delay(200);
// Read Blue Pulse Width
bluePW = getBluePW();
blueValue = map(bluePW, blueMin, blueMax, 255, 0);
B = constrain(blueValue, 0, 255);
//B=bluePW;
//clear
clearPW = getClearPW();
//clearValue = map(clearPW, blueMin, blueMax, 255, 0);
//C = constrain(clearValue, 0, 255);
// Delay to stabilize sensor
delay(200);
//TRANSFORMACION A CIE
if ((R > 210) & (G > 210) & (B > 210)) {
color = "White";
}
if ((R < 40) & (G < 40) & (B < 40)) {
color = "Black";
}
if ((180 <= R) & (R <= 255) & (170 <= G) & (G <= 255) & (0 <= B) & (B <= 160)) {
color = "Yellow";
}
if ((G - B > 20) & (G - R > 30)) {
color = "Green";
}
if ((B - G > 20) & (B - R > 40)) {
color = "Blue";
}
if ((R - G > 40) & (R - B > 40)) {
color = "Red";
}
Serial.print("R= ");
Serial.print(R);
Serial.print(" G= ");
Serial.print(G);
Serial.print(" B= ");
Serial.print(B);
Serial.print(" C= ");
Serial.print(clearPW);
Serial.print(" => ");
R = getGammaCorrectedValue(R / 255);
G = getGammaCorrectedValue(G / 255);
B = getGammaCorrectedValue(B / 255);
float X = (R * a11 + G * a12 + B * a13);
float Y = (R * a21 + G * a22 + B * a23);
float Z = (R * a31 + G * a32 + B * a33);
//Calculate the xy values from the XYZ values
float x = (X / (X + Y + Z));
float y = (Y / (X + Y + Z));
if ((x >= 0.60) & (x <= 0.75) & (y >= 0.29) & (y <= 0.34)) color = "ROJO RAL VALIDO";
if ((x >= 0.55) & (x <= 0.61) & (y >= 0.39) & (y <= 0.45)) color = "AMARILLO RAL VALIDO";
if ((x >= 0.013) & (x <= 0.30) & (y >= 0.38) & (y <= 0.76)) color = "VERDE RAL VALIDO";
if ((x >= 0.29) & (x <= 0.48) & (y >= 0.27) & (y <= 0.44)) color = "BLANCO RAL VALIDO";
if (clearPW>80 & ((1-x-y)<0.05) &(x >= 0.250) & (x <= 0.35) ) color = "NEGRO RAL VALIDO";
/* if ((color == "Green") & (y >= 0.493 - 0.524 * x) & (y >= 0.243 + 0.670 * x))
color += " VALIDO";
//if ((color == "Red") & (y <= 0.910 - 0.051 * x) & (y >= 0.314 + 0.047 * x) & (y <= 0.345 - 0.051 * x))
if ((color == "Red") & (x > 0.65) & (y > 0.29))
color += " VALIDO"; */
//FIN TRANSFORMACION A CIE
// Print output to Serial Monitor
Serial.print(color);
Serial.print(" X: ");
Serial.print(X);
Serial.print(" Y: ");
Serial.print(Y);
Serial.print(" Z: ");
Serial.print(Z);
Serial.print(" - x:");
Serial.print(x);
Serial.print(" y:");
Serial.print(y);
Serial.print(" z:");
Serial.print(1 - x - y);
Serial.println();
}
// Function to read Red Pulse Widths
int getRedPW() {
// Set sensor to read Red only
digitalWrite(S2, LOW);
digitalWrite(S3, LOW);
// Define integer to represent Pulse Width
int PW;
// Read the output Pulse Width
PW = pulseIn(sensorOut, LOW);
// Return the value
return PW;
}
// Function to read Green Pulse Widths
int getGreenPW() {
// Set sensor to read Green only
digitalWrite(S2, HIGH);
digitalWrite(S3, HIGH);
// Define integer to represent Pulse Width
int PW;
// Read the output Pulse Width
PW = pulseIn(sensorOut, LOW);
// Return the value
return PW;
}
// Function to read Blue Pulse Widths
int getBluePW() {
// Set sensor to read Blue only
digitalWrite(S2, LOW);
digitalWrite(S3, HIGH);
// Define integer to represent Pulse Width
int PW;
// Read the output Pulse Width
PW = pulseIn(sensorOut, LOW);
// Return the value
return PW;
}
// Function to read CLEAR Pulse Widths
int getClearPW() {
// Set sensor to read Blue only
digitalWrite(S2, HIGH);
digitalWrite(S3, LOW);
// Define integer to represent Pulse Width
int PW;
// Read the output Pulse Width
PW = pulseIn(sensorOut, LOW);
// Return the value
return PW;
}
float getGammaCorrectedValue(float value) {
if (value > 0.04045) {
return pow((value + 0.055) / (1.0 + 0.055), 2.4);
} else
return (value / 12.92);
}Proximamente incluiré fotos, resultados así como información más detallada.